
 �����W����RL���ڙC����ץȡ�΄��е�ϡ�誄���c�n�̌W������
�r�g��2025-05-28 ��Դ���A���hҊ
�����W����RL���ڙC����ץȡ�΄��е�ϡ�誄���c�n�̌W������
�r�g��2025-05-28 ��Դ���A���hҊ
ϡ�誄��
ͨ����Ӗ�������w�r���҂�ϣ��ÿһ���������������Ī������ijЩ��r�£������w���������̫@�ê������ȫ�֪���ć��壬��K�@�ٕ��õ���������˂����yȥ�O�����gÿ���Ī���@�����W�����������o���M�ЌW���Ć��}��
2.��Q����
2.1 �OӋ����(reward shaping)
������KҪ�W������Ŀ���⣬�����~������һЩ�����������������w������ViZDoom����Α��˔��˵õ�����������õ�ؓ���̽���ˆT�OӋ��һЩ�ª�������������w���ĸ��ã������Ѫ�Ϳ۷֣��쵽�a�o�����ӷ֣�����ԭ�ؿ۷֣�������һ����С�ķ֣���t�����wֻ���������ܔ��ˣ��ȷ�����reward shaping���g��Ҫ�I��֪�R��domain knowledge�������������OӋ���ʽ�������w�W�����e�`�ķ���������ϣ���C���ˌ��{ɫ���Ӵ��^���ӣ�ͨ�����뵽���ӿ������Ӿͼӷ֣����xԽ������Խ�����@�әC���˿��ܕ��W�������{ɫ���Ӵ����ӣ������Ǐ����洩�^������OӋ�����Ч���c�I��֪�R���P����Ҫ�{����
2.2 ������(curiosity)
�Լ����벢��һ�㿴�������õĪ������o�����w���Ϻ����ģ��Q��������ӵĪ��curiosity driven reward�����ں������ӵļ��g��҂�������һ���µĪ���������ں�����ģ�ͣ�intrinsic curiosity module��ICM����ICMģ�K��Ҫ3��ݔ�룺��Bs1������a1����Bs2������ݔ��ݔ������һ������rc(1)�����������w�����c�h�������r�����Hϣ��ԭʼ����rԽ��Ҳϣ�������Ī���rcԽ������OӋ������ģ�K����һ���W�j������ݔ��a(t)��s(t)��ݔ����Ҳ�������@���W�jȥ�A�y�����A�yֵ�c�挍s(t+1)�����ƶȣ�Խ�����ƪ���Խ�ߡ�Ҳ�����f�������Ī�������x���ڣ�δ���Ġ�BԽ�y���A�y���õ��Ī����Խ���@�ӷ���̽��δ֪�����硣
������ģ�K���O����һ�����}��ijЩ��B���y���A�y���������������Ǻõģ�������Ҫ���Lԇ�ġ�����ijЩ�Α��У���ͻȻ���F���~�h�ӣ��@�ǟo���A�y�ģ������w��һֱ�������~�h�ӡ���������w�H�к������Dz���ģ�߀��Ҫ֪��ʲô������������Ҫ�ġ�
����֪��ʲô��������Ҫ�ģ����ⲻ��Ҫ��ð�U��Ҫ��������һ��ģ�K���W��������ȡ��(feature extractor) ����D��ʾ���Sɫ������������ȡ����ݔ��һ����Bs(t)��ݔ��һ������������ʾ�@����B��������ȡ�����џo���x�Ė|���^�V������ô���ں����ľW�j1���H��ݔ�����a(t)������������ݔ����һ��B������������ΌW��������ȡ����ͨ�^�W�j2�W�����W�j2ݔ��ͣ�ݔ���A�y�������@�������c�挍����Խ�ӽ�Խ�á��W�j2������ȡ������������A�y������������L���݄��@�N�c�����w�����o�P����Ϣ�͕����^�V����
�C����ץȡ�΄���h���ӑB�ԡ����w�����Լ������B�m�ԣ��ɞ鏊���W����RL���ĵ����������������У�**ϡ�誄�Sparse Reward�����n�̌W����Curriculum Learning��**�ǃ���Ӗ��Ч���c�ɹ��ʵ��P�I���g�����Ć��}�����������OӋ�������M��ϵ�y���U����
1. ϡ�誄��ĺ�������
1.1 ϡ�誄��ij���
�΄����ԣ��H��ץȡ�ɹ��r�o�������+1���������r�̟o������0����
̽���y�ȣ��Cе���辫�_����λ�ˡ����ȣ��S�C̽���y���|�l�ɹ��¼���
�ֲ�����壺�^���Ք��������ԣ��練���|�����w���o��ץȡ����
1.2 ϡ�誄���ؓ��Ӱ�
�ӱ�Ч�ʵ��£��蔵���f�ν�������żȻ�@�óɹ���
Ӗ�����������ݶȹ�Ӌ������ԾW�j�y���Ք���
����-�F�����ϣ��������^����ه�ܼ�����w�Ƶ��挍�C���˕rʧЧ��
2. ϡ�誄���Q����
2.1 ���ڪ��Intrinsic Reward��
��������̽����
ICM��Intrinsic Curiosity Module����ͨ�^�A�y�h���ӑB���`�����ɪ���Ą�̽��δ֪��B��
RND��Random Network Distillation���������S�C�W�j�������B�·f�ԡ�
�C���ˑ���ʾ�����Cе�ۇLԇ��ͬץȡ�Ƕȕr����λ���·f�ԫ@�Ã��ڪ�����ٰl�F���в��ԡ�
2.2 Ŀ�ˌ����طţ�Goal-Based HER��
Hindsight Experience Replay��HER����
����˼�룺��δ�_��Ŀ�˵�܉�Eҕ����Ŀ�ˣ�“�mȻ�]ץ��A����ץ����B”����
���F���E��
# HER�δ��aʾ��for episode in trajectories:
achieved_goals = episode['achieved_goals']
for t in range(len(episode)):
new_goal = achieved_goals[-1] # ʹ����K�_����Ŀ��������Ŀ��
reward = compute_reward(episode['actions'][t], new_goal)
replay_buffer.store(episode[t], new_goal, reward)
Ч������Fetch�C����ץȡ�΄��У��ɹ��ʏ�12%������80%���ϡ�
2.3 �ӏ����W����HRL��
Option-Critic�ܘ���
�ߌӲ��ԣ��x����Ŀ�ˣ���“�������w”“�{���Aצ�ˑB”����
�Ӳ��ԣ����о��w�������P���Ƕȿ��ƣ���
���ݣ�ͨ�^��Ŀ�˷ֽ�ϡ�誄�����̽���y�ȡ�
3. �n�̌W�������OӋ
3.1 �n�����ɷ���
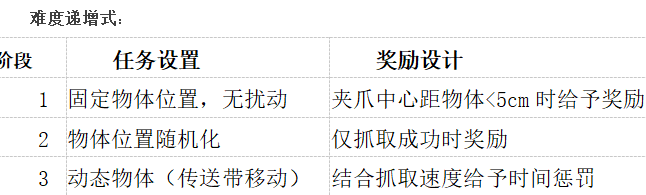
�Ԅ��n�����ɣ�Automatic Curriculum Learning����
ALP-GMM�����ڲ������܄ӑB�{���΄շֲ�������Ӗ��“�е��y��”�ӱ���
PAIRED��ͨ�^�����h�������������u�Mʽ�����΄ա�
3.2 �n�̌W���c�w��
���S�C����Domain Randomization����
�������������w�|����Ħ������ҕ�X�y�������l���S�C����
���ã��������������ԣ��sСSim2Real��ࡣ
ʾ����NVIDIA Isaac Gym��Ӗ���Cе�۲��ԣ��w�Ƶ��挍UR5�Cе�ەr�ɹ��ʱ���85%���ϡ�
�u�Mʽģ���w�ƣ�
���������h�����o������Ӗ�����A���ԡ�
�����ӂ������������t�Ȕ_���{���ԡ�
������挍�C�������M�������ӱ��{��Few-Shot Adaptation����
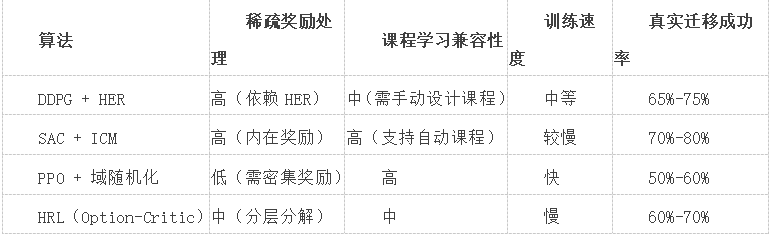
4. �㷨���F�c����
4.1 �����㷨����
4.2 �P�I����������
����s�ţ�Reward Scaling�������ڪ����c�ⲿ����ę���ƽ�⣨��λ=0.1����
�n���ГQ�ֵ�����B�m10��episode�ɹ��ʳ��^90%�r�M����һ�A�Ρ�
̽����˥�p��ε-greedy���Ե����˜ʲ��SӖ�������f�p��
4.3 Ӌ����ټ��g
���з��棺ʹ��NVIDIA Isaac Simͬ�r�\��1000���h��������
��Ͼ���Ӗ����FP16�W�jӋ�㣬����������2����
߅��-�ƅfͬӖ�����ڱ��ؙC���ˈ����������ƶ˼�Ⱥ��������ģ�͡�
5. ���͑��ð���
5.1 ���I�֒��C���ˣ�ABB YuMi��
���Լܘ���SAC + HER + �Ԅ��n�̌W����
���ܣ����s�y���w����ץȡ�ɹ���92%��Ӗ���r�g��120С�r�s����40С�r��
5.2 ���ՙC����ץȡ��Boston Dynamics Spot��
���𣺄ӑB�h����������ץȡ������ģ�B��֪��RGB-D+���X����
��������RL���ߌ�·��Ҏ��+��ץȡ���ƣ�+ ���S�C����
�Y������δ֪���wץȡ�΄����_��78%�ɹ��ʡ�
6. δ���о�����
�Z�������n�̌W��������LLM����GPT-4���Ԅ������΄������c�n��Ҏ����
���C���˅f���n�̣�ͨ�^����������C�Ʒ��䲻ͬ�y���΄ա�
Ԫ�n�̌W����Meta-Curriculum�����W����������n�̣��m��δ֪�΄շֲ���
���Y
ᘌ��C����ץȡ��ϡ�誄��}�����ڪ�������̽���cHER�����������������ӱ�Ч�ʵĺ��ģ��Y�ϝu�Mʽ�n�̌W���c���S�C�������@����߲����������c�����w�����������H����������Ӗ���ٶ��c�����ԣ��x��DDPG+HER��SAC+ICM�ȽM�ϣ���ͨ�^���л����ٵ�����δ�����S���Ԅ��n�������c��ģ�B��֪���ںϣ�RL�ڏ��sץȡ�΄��Ќ��Mһ���ƽ����ˮƽ��
 �n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ������������ĕr�������z�y�c����λģ���OӋ�����W����RL���ڙC����ץȡ�΄��е�ϡ�誄���c�n�̌WǶ��ʽ���̎�����е��΄��w���cؓ�d�����㷨�OӋ�c�������¼��ӵ�Ƕ��ʽϵ�y�����OӋ���Ă������ɘӵ����� Zephyr RTOS ��Ƕ��ʽ�{�� Mesh �W�j���c�OӋ�c����Ҏģģ��Ӗ���е� ZeRO �������c��Ͼ���ͨ�ʼn��s��W��(FL)�е��ݶ���ע���c����[˽���oƽ���������TinyML��Ƕ��ʽ�O����Z�����~�z�yģ���p������Ƕ��ʽ�o��ͨ���е����m�����l���ɔ_�㷨�c�l�VЧ�ʷ�Ƕ��ʽϵ�yӲ����ȫ���������ɿ�¡���ܣ�PUF�������
�n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ������������ĕr�������z�y�c����λģ���OӋ�����W����RL���ڙC����ץȡ�΄��е�ϡ�誄���c�n�̌WǶ��ʽ���̎�����е��΄��w���cؓ�d�����㷨�OӋ�c�������¼��ӵ�Ƕ��ʽϵ�y�����OӋ���Ă������ɘӵ����� Zephyr RTOS ��Ƕ��ʽ�{�� Mesh �W�j���c�OӋ�c����Ҏģģ��Ӗ���е� ZeRO �������c��Ͼ���ͨ�ʼn��s��W��(FL)�е��ݶ���ע���c����[˽���oƽ���������TinyML��Ƕ��ʽ�O����Z�����~�z�yģ���p������Ƕ��ʽ�o��ͨ���е����m�����l���ɔ_�㷨�c�l�VЧ�ʷ�Ƕ��ʽϵ�yӲ����ȫ���������ɿ�¡���ܣ�PUF�������

