��(d��ng)ǰλ�ã���� > Ƕ��ʽ��Ӗ(x��n) > Ƕ��ʽ�W(xu��)��(x��) > �v������ > CAN�������T��˺���
 CAN�������T��˺���
�r(sh��)�g��2018-03-15 ��Դ��can����ԭ�����T
CAN�������T��˺���
�r(sh��)�g��2018-03-15 ��Դ��can����ԭ�����T
���y�ҵ�һƪ�܉��m�ϳ��W(xu��)��CAN����ԭ�������£����С������ͨ������ԭ�t��������!

ʲô��CAN����?
CAN������(y��ng)������܇����(sh��)�F(xi��n)��ӿ������͂�����֮�g��ͨ��
Ø �߿ɿ��ԡ��ͳɱ���ͨ�Ņf(xi��)�h��
Ø �����Robert Bosch��1986���_�l(f��)��
Ø ��Ҫ��(y��ng)������܇����܇�������C(j��)�����I(y��)�C(j��)���ˡ�
����һ�£�һ�v��܇����һ��(g��)�ˣ�
Ø CAN��������(j��ng)ϵ�y(t��ng)��ʹ���w������֮�g��ͨ�ŵ��Ԍ�(sh��)�F(xi��n)��
Ø ECUͨ�^CAN�����B�ӣ�ԓ�����ஔ(d��ng)��һ��(g��)����W(w��ng)�j(lu��)ϵ�y(t��ng)��
ʲô��ECU?
Ø ����܇CAN����ϵ�y(t��ng)�У�ECUs�����ǰl(f��)��(d��ng)�C(j��)���Ɔ�Ԫ����ȫ���һ����lϵ�y(t��ng)��
Ø һ�v�F(xi��n)����܇��������70�vECUs��
CAN����5������
Ø �ͳɱ���ECUsͨ�^��(g��)CAN�ӿ��M(j��n)��ͨ�ţ������ɱ��͡�
Ø ���ɣ�CAN����ϵ�y(t��ng)���S������ECUs���M(j��n)�м����e(cu��)�`�\������á�
Ø �ɿ��ԣ�ԓϵ�y(t��ng)����ϵ�y(t��ng)�Ĺ��Ϻ�늴Ÿɔ_���к�(qi��ng)�������ԣ�����܇����ϵ�y(t��ng)�������x��
Ø ��Ч�ʣ�����ͨ�^id����Ϣ�M(j��n)�Ѓ�(y��u)�ȼ�(j��)�����Ա���߃�(y��u)�ȼ�(j��)��id�����Дࡣ
Ø �`���ԣ�ÿ��(g��)ECU����һ��(g��)����CAN�����հl(f��)оƬ���S������CAN������(ji��)�c(di��n)��
CAN�����l(f��)չʷ

Ø δ���F(xi��n)ǰ����܇ECUs����Խ��Խ��(f��)�s���c(di��n)���c(di��n)������
Ø 1986�꣺Bosch��˾�_�l(f��)��CAN�����f(xi��)�h������܇��ӽ�Q����������SAE���(hu��)�ϰl(f��)����
Ø 1991�꣺Bosch��˾�l(f��)����CAN2.0������CAN 2.0A (11 λ) ��CAN 2.0B (29 λ)��
Ø 1993�꣺CAN����������H��(bi��o)��(zh��n)(ISO 11898)��
Ø 2012�꣺Bosch��˾�l(f��)����CAN FD 1.0
Ø ���죺��ÿһ�v��܇����CAN����ϵ�y(t��ng)�����V����(y��ng)���ڿ�܇��������܇�����I(y��)܇�v���������w�C(j��)���I(y��)�Ԅ�(d��ng)����
CAN�������
չ��δ����CAN�������^�m(x��)ǰ��——���Ҹ��п������S����Ӌ(j��)�㡢��(li��n)�W(w��ng)���Ԅ�(d��ng)�{���܇���d���@Щڅ��߀�����ӿ���ʹ��WiFi /��C�W(w��ng)�j(lu��)�B�ӵ�CAN����������——���S�o����ݔ?sh��)�CAN������(sh��)��(j��)�������Ʒ���(w��)����
���ˌ�(sh��)�F(xi��n)�@һĿ��(bi��o)��CAN FD����һ��(g��)�P(gu��n)�I�ĽM�ɲ��֡������ϣ������CAN����ϵ�y(t��ng)���Rһ��(g��)��Ҫ���ϵK:1 Mbit/s���ٶ������S����(sh��)��(j��)�ٶȵď�(f��)�s�Ժ����������(�����ECUs����(sh��)��(j��))���@��һ��(g��)Խ��Խ�������(zh��n)��
Ø CAN FD�ṩ�ɂ�(g��)�P(gu��n)�I��ָ��(bi��o)��
n ��(sh��)��(j��)��ݔ�����_(d��)��8Mbit/s——�h(yu��n)�h(yu��n)������Ҏ(gu��)��1Mbit/s��
n 64�ֹ�(ji��)�Ĕ�(sh��)��(j��)��——������8�ֹ�(ji��)��
CAN���������Y(ji��)��(g��u)�c����
CAN�����W(w��ng)�j(lu��)
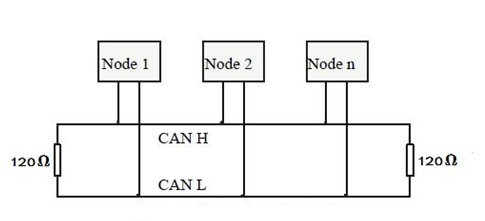
CAN�����W(w��ng)�j(lu��)��Ҫ����CAN_H��CAN_L������(g��)��(ji��)�c(di��n)ͨ�^�@�ɗl����(sh��)�F(xi��n)��̖(h��o)�Ĵ��в�ւ�ݔ�����˱�����̖(h��o)�ķ���ɔ_��߀��Ҫ��CAN_H��CAN_L֮�g����120�Wķ�ĽK����裬���Ǟ�ʲô��120�Wķ��?������?y��n)���|�������迹��120�W��
CAN�հl(f��)��
CAN�հl(f��)����������ؓ(f��)؟(z��)߉�ƽ����̖(h��o)�ƽ֮�g���D(zhu��n)�Q��
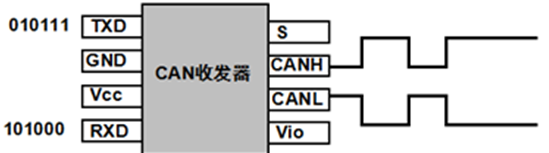
����CAN����оƬݔ��߉�ƽ��CAN�հl(f��)����Ȼ��(j��ng)�^CAN�հl(f��)����(n��i)���D(zhu��n)�Q��߉�ƽ�D(zhu��n)�Q������̖(h��o)ݔ����CAN�����ϣ�CAN�����ϵĹ�(ji��)�c(di��n)�����ԛQ���Լ��Ƿ���Ҫ�����ϵĔ�(sh��)��(j��)�����w�Ĺ̶ܽ��x���£�
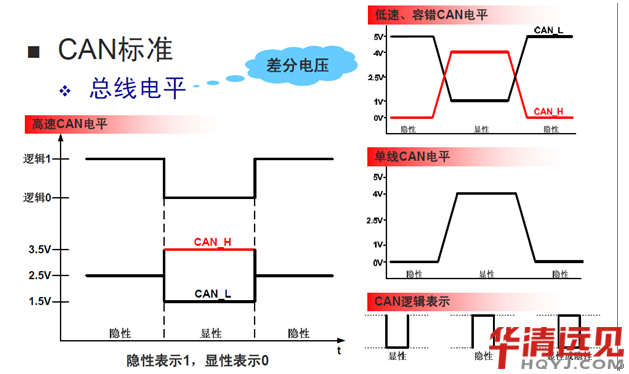
CAN��̖(h��o)��ʾ
CAN�������ò��w��aλ��似�g(sh��)��Ҳ�����fCAN�����ϵ���̖(h��o)�ЃɷN��ͬ����̖(h��o)��B(t��i)���քe���@�Ե�(Dominant)߉0���[�ε�(recessive)߉1����̖(h��o)ÿһ��ݔ�����Ҫ���ص�߉0(�@��)���ƽ��
CAN�հl(f��)����TXD��RXD���cCAN�������B�ӵġ��l(f��)�����ӵ��W(w��ng)�j(lu��)����CL��CH��CL�cCH�Dz���·��CAN�W(w��ng)�j(lu��)������CL��CH��늉������ʾ߉“0”��߉“1”������CAN�W(w��ng)�j(lu��)��ֻ�܆����ݔ��
CAN�ٲ�
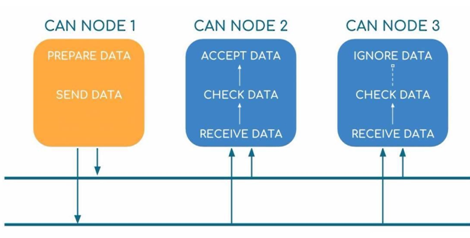
ֻҪ�������e���������κι�(ji��)�c(di��n)�����l(f��)�͈�(b��o)�ģ�����Ѓɂ�(g��)��ɂ�(g��)���ϵĹ�(ji��)�c(di��n)�_ʼ���͈�(b��o)�ģ���ô�͕�(hu��)���ڿ����L���_ͻ�Ŀ��ܡ�����CANʹ���˘�(bi��o)�R(sh��)������λ�ٲ÷������Խ�Q�@��(g��)���}��
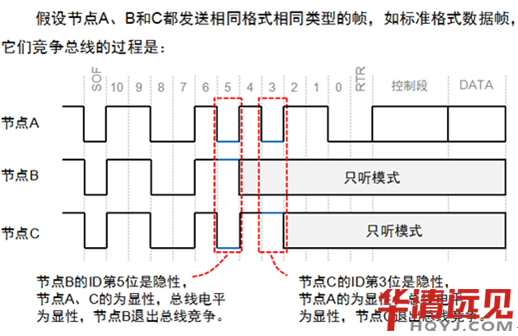
���ٲ����g��ÿһ��(g��)�l(f��)���������l(f��)�͵��ƽ�c���O(ji��n)�صĿ����ƽ�M(j��n)�б��^������ƽ��ͬ���t�@��(g��)��Ԫ�����^�m(x��)�l(f��)�͡�����l(f��)�͵���һ"�[��"�ƽ���O(ji��n)ҕ������һ"�@��"�ƽ����ô�@��(g��)��(ji��)�c(di��n)ʧȥ���ٲã�����˳��l(f��)�͠�B(t��i)��������F(xi��n)��ƥ���λ�������ٲ����g�t�a(ch��n)���e(cu��)�`�¼���
��IDԽС����(y��u)�ȼ�(j��)Խ�ߡ����ڔ�(sh��)��(j��)����RTRλ���@���ƽ���h(yu��n)�̎����[���ƽ�����Ԏ���ʽ�͎�ID��ͬ����r�£���(sh��)��(j��)����(y��u)�����h(yu��n)�̎�;���ژ�(bi��o)��(zh��n)����IDEλ���@���ƽ���U(ku��)չ����IDEλ���[���ƽ������ǰ11λID��ͬ�Ę�(bi��o)��(zh��n)���͔U(ku��)չ������(bi��o)��(zh��n)����(y��u)�ȼ�(j��)�ȔU(ku��)չ���ߡ�
CAN����ͨ�Ņf(xi��)�h
�f(xi��)�h��ʽ
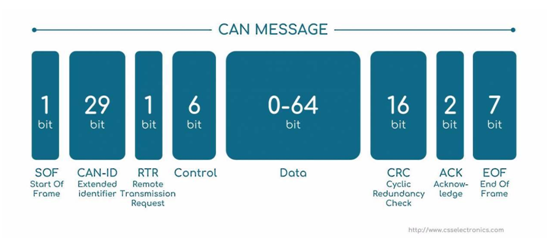
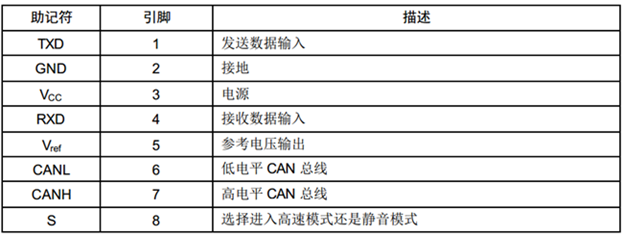
| ��̖(h��o) | ���Q | λ | ���� |
| 1 | SOF | 1 | ��ʼλ��߉0ʹ�ܣ����V����ECU����Ϣ�������_(d��)�� |
| 2 | CAN-ID | 29 | ��Ϣ��(bi��o)�R(sh��)����ֵԽ�̓�(y��u)�ȼ�(j��)Խ�� |
| 3 | RTR | 1 | �h(yu��n)�̂�ݔՈ���(bi��o)־λ�����SECUs“Ո��”��������ECUs����Ϣ�� |
| 4 | Control | 6 | ��(sh��)��(j��)���L�� |
| 5 | Data | 0-64 | ��(sh��)��(j��)��(n��i)�� |
| 6 | CRC | 16 | 16λѭ�h(hu��n)����У�(y��n)���ڱ��C��(sh��)��(j��)�������� |
| 7 | ACK | 2 | ��(y��ng)���(bi��o)־��CRC�Ƿ�У�(y��n)���_ |
| 8 | EOF | 7 | �Y(ji��)����(bi��o)�R(sh��)�� |
����
������ʹ��CANLoggerX000����܇��һ��(g��)ʾ����־�ļ�:
# Logger type: CANLogger2000
# HW rev: 6.xx
# FW rev: 5.51
# Logger ID: ID0001
# Session No.: 9
# Split No.: 3
# Time: 20170508T064128
# Value separator: ";"
# Time format: 4
# Time separator: ""
# Time separator ms: ""
# Date separator: ""
# Time and date separator: "T"
# Bit-rate: 500000
# Silent mode: false
# Cyclic mode: false
Timestamp;Type;ID;Data
08T064254150;0;34d;1003fafa000d00ff
����҂��鿴�����ԭʼCAN������(sh��)��(j��)�ӱ������ܕ�(hu��)ע�:
ԭʼ��CAN������(sh��)��(j��)�]�����x!
�@����?y��n)��҂���Ҫ���?sh��)��(j��)�D(zhu��n)�Q�ɰ�����Ӌ(j��)��Ĺ���ֵ——Ҳ��������x����ʽ��
Ҫ�����@һ�c(di��n)���҂���Ҫ֪��һЩ����:
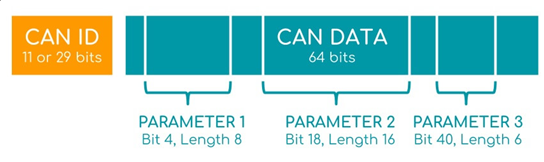
���磬��34d�е�64λ��(sh��)��(j��)�У����ܕ�(hu��)��3��(g��)��ͬ����(sh��)�Ĕ�(sh��)��(j��)��ÿ��(g��)����(sh��)����һ��(g��)�ض�����ʼ�c(di��n)��λ�L��
ᘌ��@3��(g��)��ͬ����(sh��)�Ĕ�(sh��)��(j��)���҂���ҪҪ֪����ν�a��
ÿ��(g��)����(sh��)����Ҫƫ�����Ϳ̶�ֵ
[��(sh��)��(j��)ֵ]=[ƫ��]+[�̶�]x[ԭʼ��(sh��)��(j��)ֵ]

 11�¾͘I(y��)�L(f��ng)�ư�ح���н�Y18k����н11k�����¾͘I(y��)���c(di��n)ʮ�¾͘I(y��)�L(f��ng)�ư�ح�x���A�� ��н�͘I(y��)�����ܶ����@���¾͘I(y��)�L(f��ng)�ư� | �͘I(y��)�΄ݵ��ԣ��A��W(xu��)�Ӆs��ݶ�������T�ܿɐ� ���YҲ���� 8��н�Y���t��һ�N���������e�˼ҵij���T����һ�N���YҲ�����e�����¾͘I(y��)�L(f��ng)�ư�|��һ�Q���@��(g��)��Ƹ��(bi��o)��(zh��n)���Ҷ��M(j��n)�������A���h(yu��n)Ҋ90+�(xi��ng)Ŀ�@����������2021���
f(xi��)ͬ�����(xi��ng)Ŀ���A���h(yu��n)Ҋ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���h(yu��n)Ҋ��������2021����h���k��У��Ϣ�W(xu��)�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���h(yu��n)Ҋ�����������(hu��)���ع�������УAI�˹����܌W(xu��)�ƽ��O(sh��) �A���h(yu��n)Ҋ�˹������Y���A���h(yu��n)Ҋ���������Ĵ�ʡ��(li��n)�W(w��ng)���(hu��)���s�@��(y��u)����I(y��)����
11�¾͘I(y��)�L(f��ng)�ư�ح���н�Y18k����н11k�����¾͘I(y��)���c(di��n)ʮ�¾͘I(y��)�L(f��ng)�ư�ح�x���A�� ��н�͘I(y��)�����ܶ����@���¾͘I(y��)�L(f��ng)�ư� | �͘I(y��)�΄ݵ��ԣ��A��W(xu��)�Ӆs��ݶ�������T�ܿɐ� ���YҲ���� 8��н�Y���t��һ�N���������e�˼ҵij���T����һ�N���YҲ�����e�����¾͘I(y��)�L(f��ng)�ư�|��һ�Q���@��(g��)��Ƹ��(bi��o)��(zh��n)���Ҷ��M(j��n)�������A���h(yu��n)Ҋ90+�(xi��ng)Ŀ�@����������2021���
f(xi��)ͬ�����(xi��ng)Ŀ���A���h(yu��n)Ҋ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���h(yu��n)Ҋ��������2021����h���k��У��Ϣ�W(xu��)�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���h(yu��n)Ҋ�����������(hu��)���ع�������УAI�˹����܌W(xu��)�ƽ��O(sh��) �A���h(yu��n)Ҋ�˹������Y���A���h(yu��n)Ҋ���������Ĵ�ʡ��(li��n)�W(w��ng)���(hu��)���s�@��(y��u)����I(y��)����

