 PID�㷨��C���F��ʽ�����������T
�r�g��2018-04-24 ��Դ��δ֪
PID�㷨��C���F��ʽ�����������T
�r�g��2018-04-24 ��Դ��δ֪
һ��PID�㷨����
��ˮ�ؿ���ģ�͡�����܇��ِ�����S�w����������ƽ��܇�ٶȵȿ��ƌ��F�r������A�Oֵ�c���H����Ч��֮�g����һ����ƫ����Hݔ���c��������֮�g����һ�����ӕr���������ܵõ�����Ŀ���Ч����PID���鑪�Þ�V����һ�N�Ԅӿ��������ڌ��H�����м���PID�㷨�����_��ϵ�y�����`��׃����Ч����
������ᵽ�ĎN���������ԷQ�����ϵ�y(�^�̿��ƌ������“һ�����+������”�c“�������+������ ”���c,�f���˾���푑����t+�����ӕr)��PID��������һ�N���������
���˼�x��Pָ�DZ���(Proportion)��Iָ�Ƿe��(Integral)��Dָ��(Differential)����늙C�{��ϵ�y�У�ݔ����̖������Ҫ��늙C���D�r��������̖Ҳ����(PID�㷨�r���`��=ݔ��-����)��ͬ�r늙C�D��Խ�ߣ�������̖Խ��Ҫ��㶮PID�㷨��ԭ�������ȱ��������P,I,D���Եĺ��x������Ҏ�ɣ�
1.1����P
Proportion(����)������ݔ��ƫ�����һ��������
�����{�������̞飺
y=Kp*e(t)
�{������ݔ���cݔ��ƫ������ȡ�����헲����䌍���nj��A�Oֵ�ͷ���ֵ��ֵ�ķŴ���
�Dʾ
�D1 �����Ŵ�ʾ��D
���ƌ����늙C�r������KpԽ��r��늙C�D�ٻؚw��ݔ��ֵ���ٶȌ����죬���{���`���Ⱦ�Խ�ߡ��Ķ�����Kpֵ�����Ԝp�ُķǷ��B�����B�ĕr�g������ͬ�rҲ�������늙C�D�����A�Oֵ������ʎ�����Σ��������^�ͣ��{�����̫������Ƕ�C�D��ϵ�y�������F����܇�u�[S��ǰ�M���@����Kp�^����ɵģ�����������e��I��Q�ˆ��}��
1.2 �e��I
Integral(�e��)���e��������ָ�{������ݔ���cݔ��ƫ��ķe�ֳɱ��������á�
�e�ַ��̞飺
Ti�Ƿe�֕r�g����������ʾ�e���ٶȵĴ�С��TiԽ�e���ٶ�Խ�����e������Խ����
�Dʾ
�D2 �e���{��ʾ��D
�e�֭h�����{�������mȻ�������o�B�`���Ҳ������ϵ�y��푑��ٶȣ�Ҳ���Ƿe��헵��{���������@�Ĝ������Ti�������Ǖr�g������TiֵԽ�r�gԽ�L������Ч��Խ���@������ϵ�y�ij��{�����e�ֳ���T I Խ�e�ֵķe������Խ��������e�ֳ���T I ���p���o�B�`��������^�̣������Ԝp�ٳ��{�������ϵ�y�ķ����ԡ����ԣ���횸������H���Ƶľ��wҪ����_��TI �����磺����ֵ���Ǻܴ�r�����ԜpС����Ч�����S��ԭϵ�y��ݔ��ֵ������߀��Ҫ��ƫ���M�мӷ��e�ۡ����@�����ۼӳ��^�A��ֵ�r����һ�����M��̎�����Ķ��������l�����ƶ����F��ʎ�F��
1.3 ��D
Derivative(��)����헲����䌍������늙C�D�ٵ�׃���ʡ�Ҳ����ǰ��ɴβ�ֵ�IJ
���{�������ַ��̞�
�Dʾ

�D3 �ֿ���������
�ַ�����ƫ����̖��׃��Ҏ�ɣ������f��׃��څ�ݣ�ƫ������Hƫ���׃�����ʣ�׃��Խ�죬���ֽ^��ֵԽ��ƫ������r�����֞���;ƫ��pС�r�����֞�ؓ��������ݔ�������ֲ����c�`����ֳ����ȣ���ӳ�˱�����׃����څ�ݡ�����ƫ����̖��׃��څ�݁��M�г�ǰ�{�����Ķ�������ϵ�y�Ŀ����ԡ�TdֵԽ��ǰ�������þ͕�Խ���@��������������ǰ���ơ������H�H��ƫ��ķŴ���������ʾ��ǰ�{�������������A�yƫ���׃�����ஔ����ǰ�����˿��Ɣ������ڱ������{�����У��܉���ǰ����ƫ�Ҳ�п��ܳ��Fֵؓ�������˶���ϵ�y�ij��{�F��
һ��PID�㷨����
2.1 PID�㷨�x��
PID�㷨���б����e���{��(PI)���������{����(PD)���ɸ���ϵ�yҪ���M���x��ͨ�����˸����{��Ʒ�|�������ѱ������e�֡������N���ýM���������γ�PID�{�����������PID�ַ��̞飺
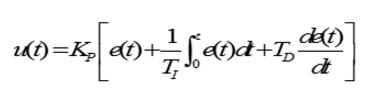
����u(t) �{������ݔ����̖;
e(t) �{������ƫ����̖�������ڽo��ֵ�c�y��ֵ֮��
Kp ���������;
T i �e�֕r�g
T d �֕r�g
KP /T I �e��ϵ��
KP / T D ��ϵ��
2.2 PID�㷨Ҫ��
PID��Ҫ��һ���]�hϵ�y����(��ڰ�)���]�hϵ�y���ڿ���ϵ�y�У��Ј���̎���Ԫ��ͬ�r�����ݔ�뷴����Ԫ��늙Cϵ�y�У�����о��a�����y��늙C�Ȝy���O�䡣����ϵ�yԭ��D���£�
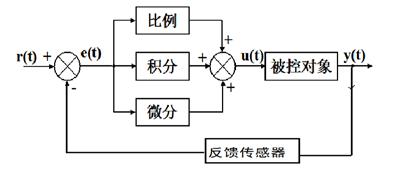
�D4 �]�hPID����ϵ�y
2.3 PID�����������E��
�������������,��������;
���{������e��,����������;
������ʎ���l��,�����̶�Ҫ�Ŵ�;
����Ư�����Ӵ�,�����̶�Ҫ��С;
����ƫ�x�؏���,�e�֕r�g��С��;
�������������L,�e�֕r�gҪ���L;
������ʎ������,�֕r�gҪ���L��
һ��C���a���F
����Ӌ��C������һ�N�ɘӿ��ƣ���ֻ�ܸ����ɘ��S�ɵ�ƫ��Ӌ�����������������ģ�M�����ǘ��B�mݔ�����������M���B�m���ơ���ô�����PID��ʽ����ֱ��ʹ�ã�����M���xɢ��̎��
���O�ɘӕr�g�g����T���t��k�r�̣�
ƫ���e(k);
�e�֞�e(k)+e(k-1)+e(k-2)+...+e(0);
�֞�(e(k)-e(k-1))/T;
�Ķ���ʽ�xɢ�������£�

k �ɘ���̖��k=0,1,2,…
u k ��k �βɘӕr�̵�Ӌ��Cݔ��ֵ
e k ��k �βɘӕr��ݔ���ƫ��ֵ
e k −1 ��k-1 �βɘӕr��ݔ���ƫ��ֵ��
���H����Ĺ�ʽ��λ��ʽPID���\���^�࣬ռ�Æ�Ƭ�C�YԴ��߀�����Ƴ�����ʽPID:
U(k) = P *e(k) + I *[e(k)+e(k-1)+...+e(0)]+ D *[e(k)-e(k-1)]��
�����������C�Z���Ќ��ɣ�
u(k) = u(k)-u(k-1) = Kp(e(k) - e(k-1)) + Ki *e(k) + Kd(e(k)) - 2e(k-1) + e(k-2))
����ı��_ʽ��������ʽ���_��ʽ��u(k)�c�������Ӌ��ƫ�����P��
C�Z��������a:
//����׃���Y���w
struct pid_type{
float Kp; //PI�{���ı�������
float Ti; //PI�{���ķe�ֳ���
float T; //�ɘ�����
float Ki;
float ek; //ƫ��e[k]
float ek1; //ƫ��e[k-1]
float ek2; //ƫ��e[k-2]
float uk; //u[k]
signed int uk1; //��u[k]��������ȡ��
signed int adjust; //�{����ݔ���{����
}pid;
//׃����ʼ
void Pid_Init(void)
{
pid.Kp=4;
pid.Ti=0.005;
pid.T=0.001;
pid.Ki=0.6; //��ϵ��Kd=KpTd/T���������H�{��
pid.ek=0;
pid.ek1=0;
pid.ek2=0;
pid.uk=0;
pid.uk1=0;
pid.adjust=0;
}
int PIDadjust(float ek) //PI�{���㷨
{
if( gabs(ek)<0.1 )
{
pid.adjust=0;
}
else
{
pid.uk=pid.Kp*(pid.ek-pid.ek1)+pid.Ki*pid.ek; //Ӌ���������
pid.ek1=pid.ek;
pid.uk1=(signed int)pid.uk;
if(pid.uk>0)
{
if(piduk-piduk1>=0.5)
{
pi.uk1=pid.uk1+1;
}
}
if(piduk<0)
{
if(pid.uk1-pid.uk>=0.5)
{
pid.uk1=pid.uk1-1;
}
}
adjust=pid.uk1;
}
return adjust;
}
һ��С�Y
�������ϵ��Pһ�㌢�ӿ�ϵ�y��푑��������o�����r�������ڜpС�o������^��ı���ϵ����ʹϵ�y�б��^��ij��{�����a����ʎ��ʹ������׃�ġ�
����e�֕r�gI�����ڜpС���{���pС��ʎ��ʹϵ�y�ķ��������ӣ�����ϵ�y�o�������r�g׃�L��
�����֕r�gD�����ڼӿ�ϵ�y��푑��ٶȣ�ʹϵ�y���{���pС�����������ӣ���ϵ�y���_�ӵ����������p����
Ҳ�����f����ϵ��P�������F��,�����F���A�Oֵ�c���H��ƫ��e�ִ������^ȥ�����^ȥTi�r�g�ȵ�ƫ��e�ۣ����Ԝp����ʎ����D������δ����������ƫ��׃���ʣ����Գ�ǰ�A�y��������ơ�
�@�����PPID�Y�ϵ��v�ķdz��ã����]�o��ң�
1. https://blog.csdn.net/u010312937/article/details/53363831#t3��PID�����㷨��C�Z�Ԍ��F<������>��
2. https://blog.csdn.net/qq229596421/article/details/51419813
3. https://blog.csdn.net/msdnwolaile/article/details/51038196
ף��ˬ!!




