 ���S�w�����Ĺ���ԭ��
�r�g��2018-12-24 ��Դ���A���hҊ
���S�w�����Ĺ���ԭ��
�r�g��2018-12-24 ��Դ���A���hҊ
���S�w��������ͳɱ��Č��ƽ�_���ڸ����I���аl�]���õĝ�����������������͵��w���������S�w�������нY�����ξo�����w��Ч�ʸߣ��C���`��ă��c��������Ҫ�U�����S�w�����Ĺ���ԭ����
���S�w�������ǽY����ε��w������������Ҳ�����������M�з������Ă������քe�a���Ă���ֱ����������Ă���Ť�������@�˂���̎��ƽ���B�r�����S�w�����������o ֹ�Ŀ՚���ƽ����ͣ������������һ�����߶�������ͬ��׃�r�����S�w�����������x�_ƽ����B������Ҫ�ķ����M�и�׃��
���S�w���������^���б����Dz������ģ���Ҫһ���w�п���ϵ�y��ÿһ��늙C��ݔ���� �M�Ќ��r�{�����@��ϵ�y��Ҫ���Ĺ����Ǚz�y���S�w������ǰ��̎���ˑB����Ӌ����������� ͬ�r�����Ă�늙C������ʹ�w�����������l����׃���D 2-1 ���S�w�����w��ԭ�� չ�F���� ��ͣ�r�Ă�늙C���D��һ�¡��D 2-2 ���S�w������r����D �����S�w������r����D���� �ӣ�1��3 ̖늙C�p�٣�2��4 ̖늙C���١����������r��ơ�
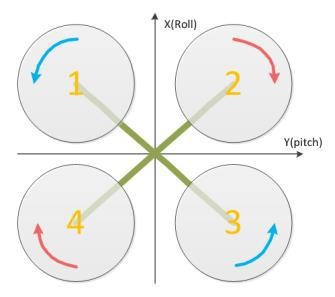
�D 2-1 ���S�w�����w��ԭ��
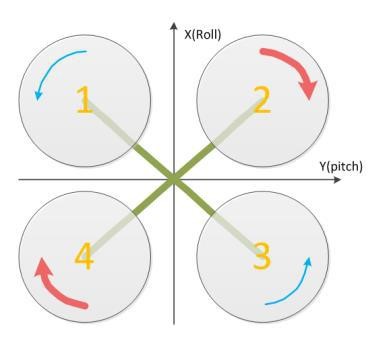
�D 2-2 ���S�w������r����D
���F�Ԅӿ��Ƶ���Ҫ�����^�̷֞�ɂ����֡���һ���֞��ˑB���㣬��������ͨ�^�� ����ͬ�đT�Ԃ�����������_�P�@ȡ��ǰ���S�w�������ˑB������ͨ�^��Ԫ���㷨�ͻ��a�V �����M���ںϺ��ˑB�e�֣�����ͨ�^��Ԫ���D�W���Ǿ�ꇣ��ó���ǰ���w�����ˑB�Ƕȡ��ڶ����֞�����㷨�������������î�ǰ���ˑB�Ƕ��c�����ˑB�Ƕ������ȣ��õ�ƫ��Ƕ�,��ƫ��Ƕ�ݔ�� PID �����㷨������ݔ�����������ϵ���������������������������������ͨ�^ӳ���Pϵ��ӳ�䵽�Ă�늙Cݔ�������Ɍ��F�w�����Ԅӿ����w�С�
���S�w������Ӳ���M����Ҫ���w�п��ư塢�Դ����ģ�K�Լ��oˢ����{���������ֽM�ɣ��w�п���������������ϵ�y�ĺ��ģ���ؓ؟Ӌ�㮔ǰ�w�������ˑB����ݔ�����������w�п��ư��ϴ��d�����S���݃x�����S���ٶ�Ӌ�����S�������������≺���������� GPS ģ �K���Դģ�K��Ҫؓ؟�������S�w�����Ĺ�늣�ͬ�rؓ؟�O�ع���늳ص������r���Դ_�����S�w�����܉���������������o���oˢ����{������Ҫؓ؟�������o�Пoˢ늙C���� �����^���У����w�п��ư��ָ�]�{�أ������w�п��ư����ṩ�����P����ݔ�����Ɵoˢ늙C��
�������w�����ڿ��g���� 6 �����ɶȣ��քe�� 3 �������S��ƽ�ƺ����D���������@ 6 �� ���ɶȵĿ��ƶ�����ͨ�^�{����ͬ늙C���D�ف팍�F��
������\�Ӡ�B�քe�飺
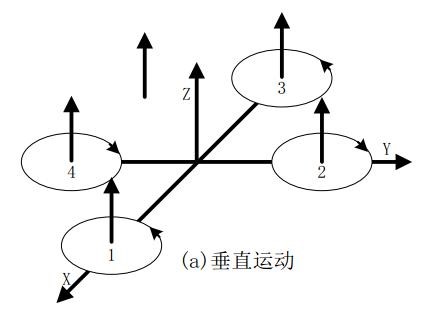
1. ��ֱ�\�� �ڈDa�У����ЃɌ�늙C�D���෴������ƽ���䌦�C���ķ�Ť�أ���ͬ�r���� �Ă�늙C��ݔ�����ʣ������D������ʹ�ÿ��������������������Կ˷����C�� �����r���������w�������x�ش�ֱ��������֮��ͬ�r�pС�Ă�늙C��ݔ�����ʣ��� �����w�����t��ֱ�½���ֱ��ƽ����أ����F���� z �S�Ĵ�ֱ�\�ӣ������_���� ����r���������a�������������w���������ؕr���w�����㱣�֑�ͣ��B�����C�� �������D��ͬ�����ӻ�pС�Ǵ�ֱ�\�ӵ��P�I��
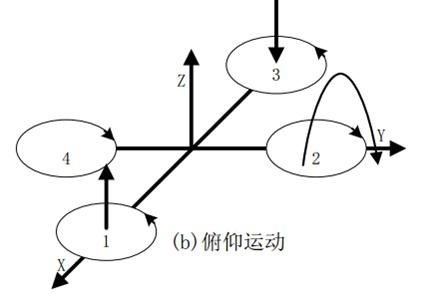
2. �����\���ڈDb�У�늙C1���D��������늙C3���D���½���늙C 2��늙C4���D�ٱ��ֲ�׃�����˲���������D�ٵĸ�׃�����������w�������wŤ�ؼ���������׃������1�c����3�D��ԓ׃���Ĵ�С����ȣ���������1����������������3�������½����a���IJ�ƽ������ʹ�C���@y�S���D��������D��ʾ����ͬ������늙C1���D���½���늙C3���D���������C�����@y�S����һ���������D�����F�w�����ĸ����\�ӣ�
3. �L�D�\���c�Dbԭ����ͬ���ڈDc�У���׃늙C2��늙C4���D�٣�����늙C1��늙C3���D�ٲ�׃���t��ʹ�C���@x�S���D������ͷ������F�w�����ĝL�D�\�ӣ�
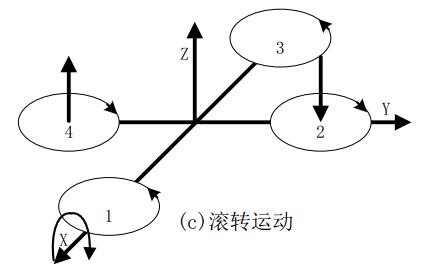
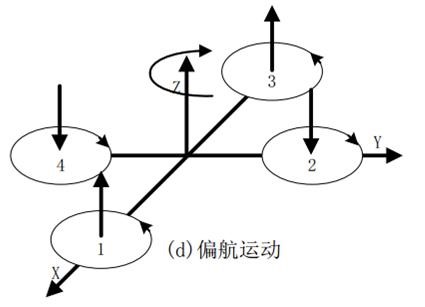
4. ƫ���\���������w����ƫ���\�ӿ��Խ��������a���ķ�Ť�팍�F�������D���^������ �ڿ՚��������Õ��γ��c�D�ӷ����෴�ķ�Ť�أ����˿˷���Ť��Ӱ푣���ʹ�Ă������еăɂ����D���ɂ����D���Ҍ��Ǿ��ϵā�����������D�ӷ�����ͬ����Ť�صĴ�С�c�����D�����P�����Ă�늙C�D����ͬ�r���Ă������a���ķ�Ť���ƽ���������w�������l���D�ӣ����Ă�늙C�D�ٲ���ȫ��ͬ�r����ƽ��ķ�Ť�ؕ������������w�����D�ӣ� �ڈDd�У���늙C1��늙C3���D��������늙C2��늙C4���D���½��r������1������3���C���ķ�Ť�ش�������2������4���C���ķ�Ť�أ��C�����ڸ��෴Ť�ص��������@z�S�D�ӣ����F�w������ƫ���\�ӣ��D���c늙C1��늙C3���D���෴��
5. ǰ���\�� Ҫ�댍�F�w������ˮƽ���ǰ�����ҵ��\�ӣ������ˮƽ��Ȍ��w����ʩ�� һ���������ڈDe�У�����늙C3�D�٣�ʹ�������������pС늙C1�D�٣�ʹ�����pС��ͬ�r���������ɂ�늙C�D�ٲ�׃����Ť����ȻҪ����ƽ�⣻���Db����Փ���w�������Ȱl��һ���̶ȵăAб���Ķ�ʹ���������a��ˮƽ��������˿��Ԍ��F�w������ǰ�w�\�ӣ�����w���c��ǰ�w�������෴����Ȼ�ڈDb�Dc�У��w�����ڮa�������� ���L�\�ӵ�ͬ�rҲ���a����x��y�S��ˮƽ�\�ӣ�

6.�����\�� �ڈDf�У����ڽY�����Q�����Ԃ����w�еĹ���ԭ���cǰ���\����ȫһ�ӣ�





