��(d��ng)ǰλ�ã���� > Ƕ��ʽ��Ӗ(x��n) > Ƕ��ʽ�W(xu��)��(x��) > �v������ > IIC��C(j��)�_�l(f��)�^��
 IIC��C(j��)�_�l(f��)�^��
�r�g��2017-11-07 ��Դ��δ֪
IIC��C(j��)�_�l(f��)�^��
�r�g��2017-11-07 ��Դ��δ֪
IIC��һ�N�·�弉�İ��p����Mͨ�ſ���
IIC ��Inter-Integrated Circuit
��ͬһ�K�·��������оƬ��оƬ֮�gͨ��(���ڶ�оƬ֮�g��ͨ��)
���p��:
����ͨ�Ž��|(zh��)������
�ɸ�����һ�����Á����(sh��)��(j��)����һ�����Á�ͬ���r�(SDA:��(sh��)��(j��)������SCL:�r犿���)
�Ƀ�֮�g�������M(j��n)��ͨ�ţ����DZ��Ҫ��һ��оƬ�_ʼ�l(f��)��
�弉:
��ͬһ�K�·��������оƬ��оƬ֮�gͨ��(���ڶ�оƬ֮�g��ͨ��)
���p��:
����ͨ�Ž��|(zh��)������
�ɸ�����һ�����Á����(sh��)��(j��)����һ�����Á�ͬ���r�(SDA:��(sh��)��(j��)������SCL:�r犿���)
�Ƀ�֮�g�������M(j��n)��ͨ�ţ����DZ��Ҫ��һ��оƬ�_ʼ�l(f��)��
IIC���п����ĽM�ɺ���ԭ��
1.���ô��п������g(sh��)����ʹϵ�y(t��ng)Ӳ���O(sh��)Ӌ�����ϵ�y(t��ng)���w�e�pС���ɿ�����ߡ�
ͬ�r��ϵ�y(t��ng)�ĸ��ĺ͔U(ku��)��O�����ס�
���ڰ弉��ͨ��(оƬ��оƬ֮�g��ͨ��)
���ڰ弉���O(sh��)��֮�g��ͨ�ſ�����rs232��485��can�����ȵȁ�ͨ��
�弉ͨ�ž��x����̫�L
�������B��IIC��ͨ��ԭ��
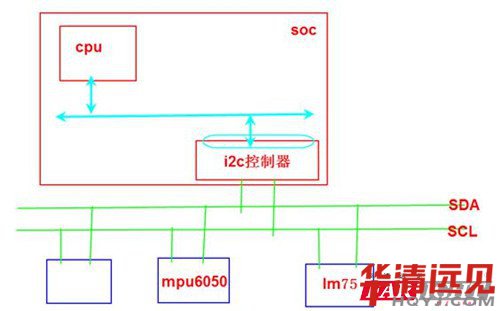
1. ͨ�ŵİl(f��)��ͽY(ji��)���������C(j��)����
2. ÿ�����O(sh��)�䶼��һ����ַ
3. ��ݔ��(sh��)��(j��)�ĕr��sda����(y��ng)�Ĕ�(sh��)��(j��)��̖�Č��� Ҫ��scl�ĸ��ƽ�Č���Ҫ����
sda��׃ֻ����scl̎�ڵ��ƽ�ĕr��
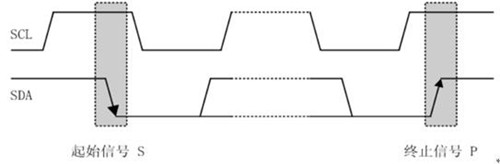
4. ��scl̎�ڸ��ƽ�ĕr�����sda�a(ch��n)���˸�->�͵���׃��һ��ͨ���_ʼ����->�ߵ���׃��һ��ͨ�ŽY(ji��)��
5. ��(sh��)��(j��)�l(f��)�ͣ�һ��ֻ�l(f��)1���ֹ�(ji��)���]����һ��byte��Ĕ�(sh��)��(j��)�ĕr��Ҫ��һ��ack��(sh��)��(j��)λ
��MPU-6050_DataSheet_V3 4.pdf������ ���O(sh��)��
���ҏ��O(sh��)���ַ

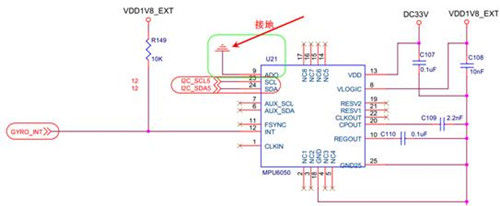
����AD0ֵ��0��
���O(sh��)���ַ��0x68
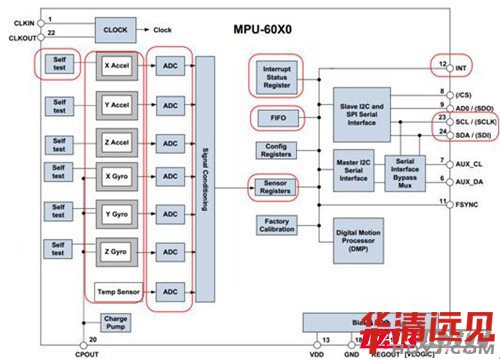

��(n��i)���Ĵ�����ַ���ԅ��������n���Y��\i2c\mpu6050�Ĵ���.doc��
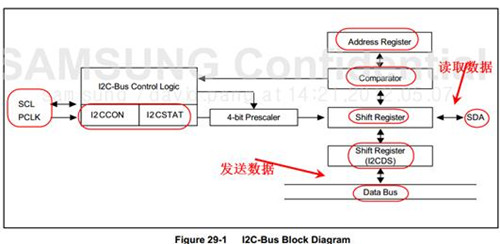
���ψD���Կ�����4412�ṩ4���Ĵ�����������е�IIC������SDA���ϵĔ�(sh��)��(j��)��IICDS�Ĵ�����(j��ng)�^��λ�Ĵ����l(f��)������ͨ�^��λ�Ĵ�������IICDS�Ĵ�����IICADD�Ĵ����б���4412��(d��ng)���ęC(j��)�r�ĵ�ַ��IICCON��IICSTAT�ɂ��Ĵ����Á����ƻ��(bi��o)�R���N��B(t��i)�������x��������ģʽ���l(f��)��S��̖��P��̖���Q���Ƿ�l(f��)��ACK��̖���z�y�Ƿ���յ�ACK��̖��
���C(j��)�dz�ʼ�������Ĕ�(sh��)��(j��)��ݔ���a(ch��n)�����S��ݔ?sh��)ĕr���̖
�������˕r�κα���ַ�����������J(r��n)���ǏęC(j��)
Exynos4412����ָ�̎����֧��4��IIC������������������ʹ�B���ڿ����ϵ����͏��O(sh��)��֮�g��ݔ��(sh��)��(j��)�����õĔ�(sh��)��(j��)��SDA�͕r���̖��SCL��ʹ�ã����������p��ġ�
��������ڶ����C(j��)��IIC����ģʽ������4412̎�������ďęC(j��)�ǽ��Ք�(sh��)��(j��)��l(f��)�͔�(sh��)��(j��)�o�ęC(j��)����IIC�����ϵ����C(j��)��4412�����ӻ�Kֹһ����(sh��)��(j��)��ݔ��4412��IIC��������������һ����(bi��o)��(zh��n)��IIC�����ٲÙC(j��)��ȥ���F(xi��n)�����C(j��)�Ͷ��ęC(j��)��ݔ��(sh��)��(j��)��
ͨ�^�������¼Ĵ����Ԍ��F(xi��n)IIC�����ϵĶ����C(j��)������
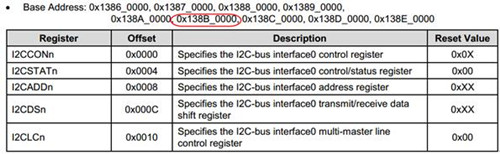
���ƼĴ����� I2CCON
��B(t��i)�Ĵ����� I2CSTAT
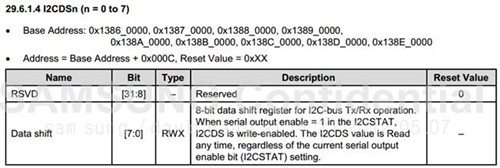
Tx/Rx��(sh��)��(j��)ƫ�ƼĴ����� I2CDS
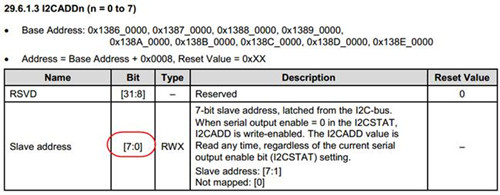
��ַ�Ĵ����� I2CADD
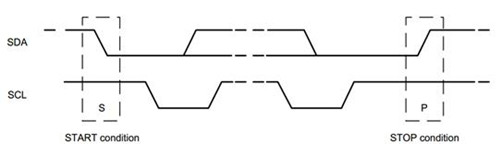
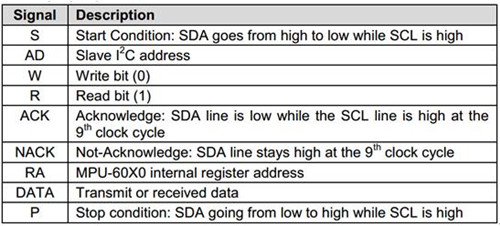
���I2C�������e����ôSCL��SDA��̖����������ƽ����SCL����ƽ���g�����SDA���ɸߵ����ƽ����׃����ô������һ����ʼ��̖�����SDA���ɵ͵����ƽ����׃��������һ���Y(ji��)����̖��
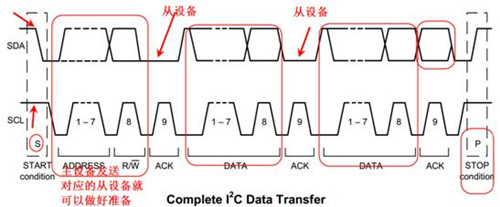
���C(j��)�˵��O(sh��)�係���ṩ��ʼ��ֹͣ��̖��һ�ˡ�����ʼ��̖���l(f��)����һ����(sh��)��(j��)�ֹ�(ji��)��ǰ7λ����(d��ng)����ַͨ�^SDA������ݔ���@������ֵ�Q���˿����ϵ����O(sh��)�䌢Ҫ�x���ǂ����O(sh��)�������ݔ����bit8�Q����ݔ��(sh��)��(j��)�ķ���(���x߀�nj�)��
I2C�����ϵĔ�(sh��)��(j��)(����SDA�ς�ݔ?sh��)Ĕ?sh��)��(j��))������8λ�ֹ�(ji��)��ݔ?sh��)ģ��ڿ����ς�ݔ�������^���У����l(f��)�ͻ���յĔ�(sh��)��(j��)�ֹ�(ji��)��(sh��)�Ǜ]�����Ƶġ�I2C�����ϵ���/���O(sh��)��l(f��)�͔�(sh��)��(j��)������һ����(sh��)��(j��)�ĸ�λ�_ʼ��ݔ(��MSB��ʽ)����ݔ��һ���ֹ�(ji��)��(y��ng)����̖�o�����
1. �_ʼ��ֹͣ�l��
��(d��ng)4412��I2C�ӿڿ��e�r�������������ڏęC(j��)ģʽ�������f��4412�ĵ�i2c�ӿ���SDA���ϲ��X��һ����ʼ��̖֮ǰ����(y��ng)ԓ�����ڏęC(j��)ģʽ����(d��ng)��������׃4412��i2c�ӿڵĹ���ģʽ�����C(j��)ģʽ��SDA���ϰl(f��)��(sh��)��(j��)��ݔ���ҿ��������a(ch��n)��SCL�r���̖��
�_ʼ�l��ͨ�^SDA���M(j��n)�д��е��ֹ�(ji��)��ݔ��һ��ֹͣ��̖�Kֹ��(sh��)��(j��)��ݔ��ֹͣ��̖��ָSCL�ڸ��ƽ����SDA���Џĵ͵����ƽ����׃�����C(j��)�ˮa(ch��n)����ʼ��ֹͣ�l������(d��ng)�������O(sh��)��a(ch��n)��һ����ʼ��̖��,I2C�������M(j��n)��æ��B(t��i)���@����Ҫ�f���������������O(sh��)�䶼�п����������C(j��)�ˡ�
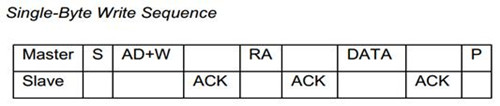
��(d��ng)һ�����C(j��)�l(f��)����һ����ʼ��̖����Ҳ��(y��ng)ԓ�l(f��)��һ���ęC(j��)��ַ��֪ͨ�����ϵď��O(sh��)�䡣�@����ַ�ֹ�(ji��)�ĵ�7λ��ʾ���O(sh��)���ַ����λ��ʾ��ݔ��(sh��)��(j��)�ķ������C(j��)��Ҫ�M(j��n)���x߀�nj�����(d��ng)��λ��0�r�������l(f��)��һ��������(�l(f��)�Ͳ���)����(d��ng)��λ��1�r�������l(f��)��һ���x��(sh��)��(j��)��Ո���ղ�������
���C(j��)�˰l(f��)��һ���Y(ji��)����̖����ɂ�ݔ������������C(j��)�����ڿ������^�m(x��)�M(j��n)�Д�(sh��)��(j��)�Ă�ݔ�������l(f��)������һ����ʼ��̖�͏��O(sh��)���ַ�����@�ӵķ�ʽ�����������ø��N���ӵĸ�ʽ�M(j��n)���x��������
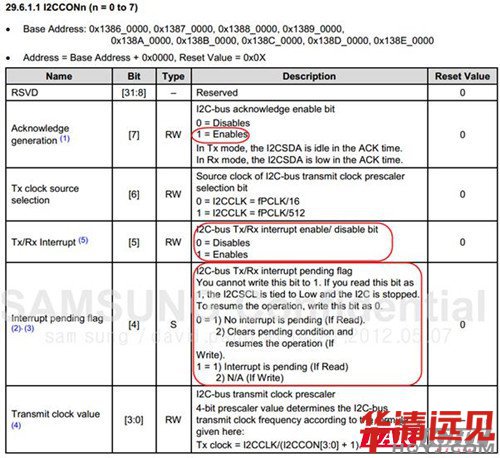
��7���Ƿ��ack
�l(f��)��ģʽ�£����� 1
����ģʽ�£��ٵȴ�����data֮ǰ��Ҫ�@��λ��0����ʾ�����؏�(f��)ack��
��5��ʹ���Д�
��4����0 ���Д࣬��1 �oЧ��
ÿ�Δ�(sh��)��(j��)��ݔ�ꮅ����Ҫͨ�^�Д�ԓλ �������1 ��ʾ�Д౻���ӣ���ʾ�������ܳɹ�

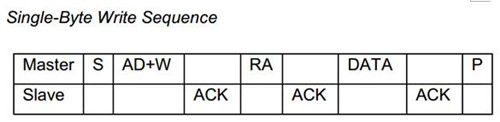
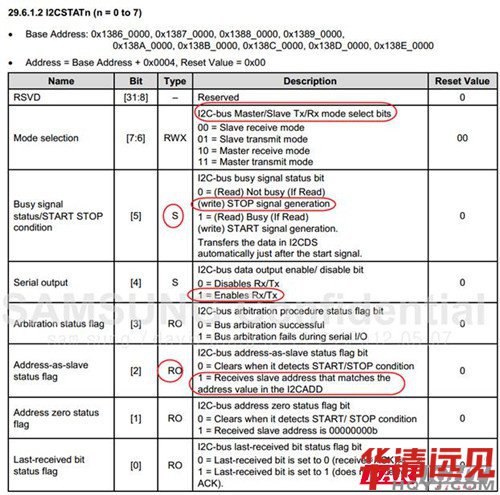
��5��
��1 �Ͱl(f��)start��̖ s
��0 �l(f��)��stop��̖ p
��4���L����1
���O(sh��)���ַ
�x���Ĕ�(sh��)��(j��) ���_�Ĵ���


����(ji��)�cGPX3 27

typedef struct
{
unsigned int I2CCON;
unsigned int I2CSTAT;
unsigned int I2CADD;
unsigned int I2CDS;
unsigned int I2CLC;
}i2c5;
#define I2C5 (*(volatile i2c5 *)0x138B0000 )
#include "exynos_4412.h"
//#include "led.h"
// MPU6050��(n��i)����ַ
#define SMPLRT_DIV 0x19 //���݃x�ɘ��ʣ�����ֵ��0x07(125Hz)
#define CONFIG 0x1A //��ͨ�V���l�ʣ�����ֵ��0x06(5Hz)
#define GYRO_CONFIG 0x1B //���݃x�ԙz���y������������ֵ��0x18(���ԙz��2000deg/s)
#define ACCEL_CONFIG 0x1C //����Ӌ�ԙz���y����������ͨ�V���l�ʣ�����ֵ��0x01(���ԙz��2G��5Hz)
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B //�Դ����������ֵ��0x00(��������)
#define WHO_AM_I 0x75 //IIC��ַ�Ĵ���(Ĭ�J(r��n)��(sh��)ֵ0x68��ֻ�x)
#define SlaveAddress 0xD0 //IIC����r�ĵ�ַ�ֹ�(ji��)��(sh��)��(j��)��+1���xȡ
int adc_num;
void delay_ms(unsigned int time)
{
int i, j;
while(time--)
{
for (i = 0; i < 5; i++)
for (j = 0; j < 514; j++);
}
}
void mydelay_ms(int time)
{
int i, j;
while(time--)
{
for (i = 0; i < 5; i++)
for (j = 0; j < 514; j++);
}
}
void do_irq()
{
static int a = 1;
int irq_num;
irq_num = CPU0.ICCIAR&0x3ff; //�@ȡ�Д�̖
switch(irq_num)
{
case 57:
printf("in the irq_handler\n");
if(a)
led_on(1);
else
led_off(1);
a = !a;
EXT_INT41_PEND = EXT_INT41_PEND |((0x1 << 1)); //��GPIO�Д���(bi��o)־λ
ICDICPR.ICDICPR1 = ICDICPR.ICDICPR1 | (0x1 << 25); //��GIC�Д���(bi��o)־λ
break;
case 75:
printf("in the wdt interrupt\n");
WDT.WTCNT = 180000;
WDT.WTCLRINT = 0;
ICDICPR.ICDICPR2 = ICDICPR.ICDICPR2 | (1 << 11);
break;
case 42:
//printf("in the adc interrupt!\n");
adc_num = ADCDAT&0xfff;
printf("adc = %d\n",adc_num);
CLRINTADC = 0;
IECR2 = IECR2 | (1 << 19);
//42/32
ICDICPR.ICDICPR1 = ICDICPR.ICDICPR1 | (1 << 10);
break;
case 76:
printf("in the alarm interrupt!\n");
RTCINTP = RTCINTP | (1 << 1);
ICDICPR.ICDICPR2 = ICDICPR.ICDICPR2 | (0x1 << 12); //��GIC�Д���(bi��o)־λ
break;
case 77:
printf("in the tic interrupt!\n");
RTCINTP = RTCINTP | (1 << 0);
ICDICPR.ICDICPR2 = ICDICPR.ICDICPR2 | (0x1 << 13); //��GIC�Д���(bi��o)־λ
break;
}
CPU0.ICCEOIR = CPU0.ICCEOIR&(~(0x3ff))|irq_num; //��cpu�Д���(bi��o)־λ
}
@brief iic read a byte program body
@param[in] slave_addr, addr, &data
@return None
void iic_read(unsigned char slave_addr, unsigned char addr, unsigned char *data)
{
I2C5.I2CDS = slave_addr; //���ęC(j��)��ַ����I2CDS�Ĵ�����
I2C5.I2CCON = (1 << 7)|(1 << 6)|(1 << 5); //�O(sh��)�Õr犲�ʹ���Д�
I2C5.I2CSTAT = 0xf0; //[7:6]�O(sh��)�Þ�0b11�����C(j��)�l(f��)��ģʽ��
//��[5��4]λ��0b11�����a(ch��n)��������̖,�l(f��)��IICDS�Ĵ����еĵ�ַ
while(!(I2C5.I2CCON & (1 << 4))); // �ȴ���ݔ�Y(ji��)������ݔ�Y(ji��)����I2CCON [4]λ��1����(bi��o)�R���Д�l(f��)����
// ��λ��1�r��SCL�������ͣ��˕rI2C��ݔֹͣ��
I2C5.I2CDS = addr; //������ֵ
I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));// I2CCON [4]λ��0���^�m(x��)��ݔ
while(!(I2C5.I2CCON & (1 << 4)));// �ȴ���ݔ�Y(ji��)��
I2C5.I2CSTAT = 0xD0; // I2CSTAT[5:4]λ��0b01,�l(f��)��ֹͣ��̖
I2C5.I2CDS = slave_addr | 1; //��ʾҪ�x����(sh��)��(j��)
I2C5.I2CCON = (1 << 7)|(1 << 6) |(1 << 5) ; //�O(sh��)�Õr犲�ʹ���Д�
I2C5.I2CSTAT = 0xb0;//[7:6]λ0b10,���C(j��)����ģʽ��
//��[5��4]λ��0b11�����a(ch��n)��������̖,�l(f��)��IICDS�Ĵ����еĵ�ַ
I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));
while(!(I2C5.I2CCON & (1 << 4)));//�ȴ���ݔ�Y(ji��)�������Ք�(sh��)��(j��)
I2C5.I2CCON &= ~((1<<7)|(1 << 4));/* Resume the operation & no ack*/
// I2CCON [4]λ��0���^�m(x��)��ݔ�����Ք�(sh��)��(j��)��
// ���C(j��)���������յ���һ�ֹ�(ji��)��(sh��)��(j��)���l(f��)����(y��ng)����̖ no ack
// �ęC(j��)�l(f��)����ጷ�SDA���������S���C(j��)�l(f��)��P��̖��ֹͣ��ݔ��
while(!(I2C5.I2CCON & (1 << 4)));// �ȴ���ݔ�Y(ji��)��
I2C5.I2CSTAT = 0x90;
*data = I2C5.I2CDS;
I2C5.I2CCON &= ~(1<<4); /*clean interrupt pending bit */
mydelay_ms(10);
*data = I2C5.I2CDS;
}
@brief iic write a byte program body
@param[in] slave_addr, addr, data
@return None
void iic_write (unsigned char slave_addr, unsigned char addr, unsigned char data)
{
I2C5.I2CDS = slave_addr;
I2C5.I2CCON = (1 << 7)|(1 << 6)|(1 << 5) ;
I2C5.I2CSTAT = 0xf0;
while(!(I2C5.I2CCON & (1 << 4)));
I2C5.I2CDS = addr;
I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));
while(!(I2C5.I2CCON & (1 << 4)));
I2C5.I2CDS = data;
I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));
while(!(I2C5.I2CCON & (1 << 4)));
I2C5.I2CSTAT = 0xd0;
I2C5.I2CCON = I2C5.I2CCON & (~(1 << 4));
mydelay_ms(10);
}
void MPU6050_Init ()
{
iic_write(SlaveAddress, PWR_MGMT_1, 0x00);
iic_write(SlaveAddress, SMPLRT_DIV, 0x07);
iic_write(SlaveAddress, CONFIG, 0x06);
iic_write(SlaveAddress, GYRO_CONFIG, 0x18);
iic_write(SlaveAddress, ACCEL_CONFIG, 0x01);
}
int get_data(unsigned char addr)
{
char data_h, data_l;
iic_read(SlaveAddress, addr, &data_h);
iic_read(SlaveAddress, addr+1, &data_l);
return (data_h<<8)|data_l;
}
/*
* ��C(j��)���a����ͬ��LINUX ��(y��ng)�Ìӣ� һ����ѭ�h(hu��n)����
*/
int main()
{
int data;
unsigned char zvalue;
GPB.CON = (GPB.CON & ~(0xff<<8)) | 0x33<<8; // GPBCON[3], I2C_5_SCL GPBCON[2], I2C_5_SDAn
mydelay_ms(100);
uart_init();
I2C5.I2CSTAT = 0xD0;
I2C5.I2CCON &= ~(1<<4); /*clean interrupt pending bit */
mydelay_ms(100);
MPU6050_Init();
mydelay_ms(100);
printf("\n********** I2C test!! ***********\n");
while(1)
{
//Turn on
data = get_data(GYRO_ZOUT_H);
printf(" GYRO --> Z <---:Hex: %x", data);
data = get_data(GYRO_XOUT_H);
printf(" GYRO --> X <---:Hex: %x", data);
printf("\n");
mydelay_ms(1000);
}
return 0;
}

 11�¾͘I(y��)�L(f��ng)�ư�ح���н�Y18k����н11k�����¾͘I(y��)���cʮ�¾͘I(y��)�L(f��ng)�ư�ح�x���A�� ��н�͘I(y��)�����ܶ����@���¾͘I(y��)�L(f��ng)�ư� | �͘I(y��)�΄ݵ��ԣ��A��W(xu��)�Ӆs��ݶ�������T�ܿɐ� ���YҲ���� 8��н�Y���t��һ�N���������e�˼ҵij���T����һ�N���YҲ�����e�����¾͘I(y��)�L(f��ng)�ư�|��һ�Q���@����Ƹ��(bi��o)��(zh��n)���Ҷ��M(j��n)�������A���h(yu��n)Ҋ90+�Ŀ�@����������2021���
f(xi��)ͬ�����Ŀ���A���h(yu��n)Ҋ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���h(yu��n)Ҋ��������2021����h���k��У��Ϣ�W(xu��)�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���h(yu��n)Ҋ��������������ع�������УAI�˹����܌W(xu��)�ƽ��O(sh��) �A���h(yu��n)Ҋ�˹������Y���A���h(yu��n)Ҋ���������Ĵ�ʡ��(li��n)�W(w��ng)������s�@��(y��u)����I(y��)����
11�¾͘I(y��)�L(f��ng)�ư�ح���н�Y18k����н11k�����¾͘I(y��)���cʮ�¾͘I(y��)�L(f��ng)�ư�ح�x���A�� ��н�͘I(y��)�����ܶ����@���¾͘I(y��)�L(f��ng)�ư� | �͘I(y��)�΄ݵ��ԣ��A��W(xu��)�Ӆs��ݶ�������T�ܿɐ� ���YҲ���� 8��н�Y���t��һ�N���������e�˼ҵij���T����һ�N���YҲ�����e�����¾͘I(y��)�L(f��ng)�ư�|��һ�Q���@����Ƹ��(bi��o)��(zh��n)���Ҷ��M(j��n)�������A���h(yu��n)Ҋ90+�Ŀ�@����������2021���
f(xi��)ͬ�����Ŀ���A���h(yu��n)Ҋ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���h(yu��n)Ҋ��������2021����h���k��У��Ϣ�W(xu��)�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���h(yu��n)Ҋ��������������ع�������УAI�˹����܌W(xu��)�ƽ��O(sh��) �A���h(yu��n)Ҋ�˹������Y���A���h(yu��n)Ҋ���������Ĵ�ʡ��(li��n)�W(w��ng)������s�@��(y��u)����I(y��)����

